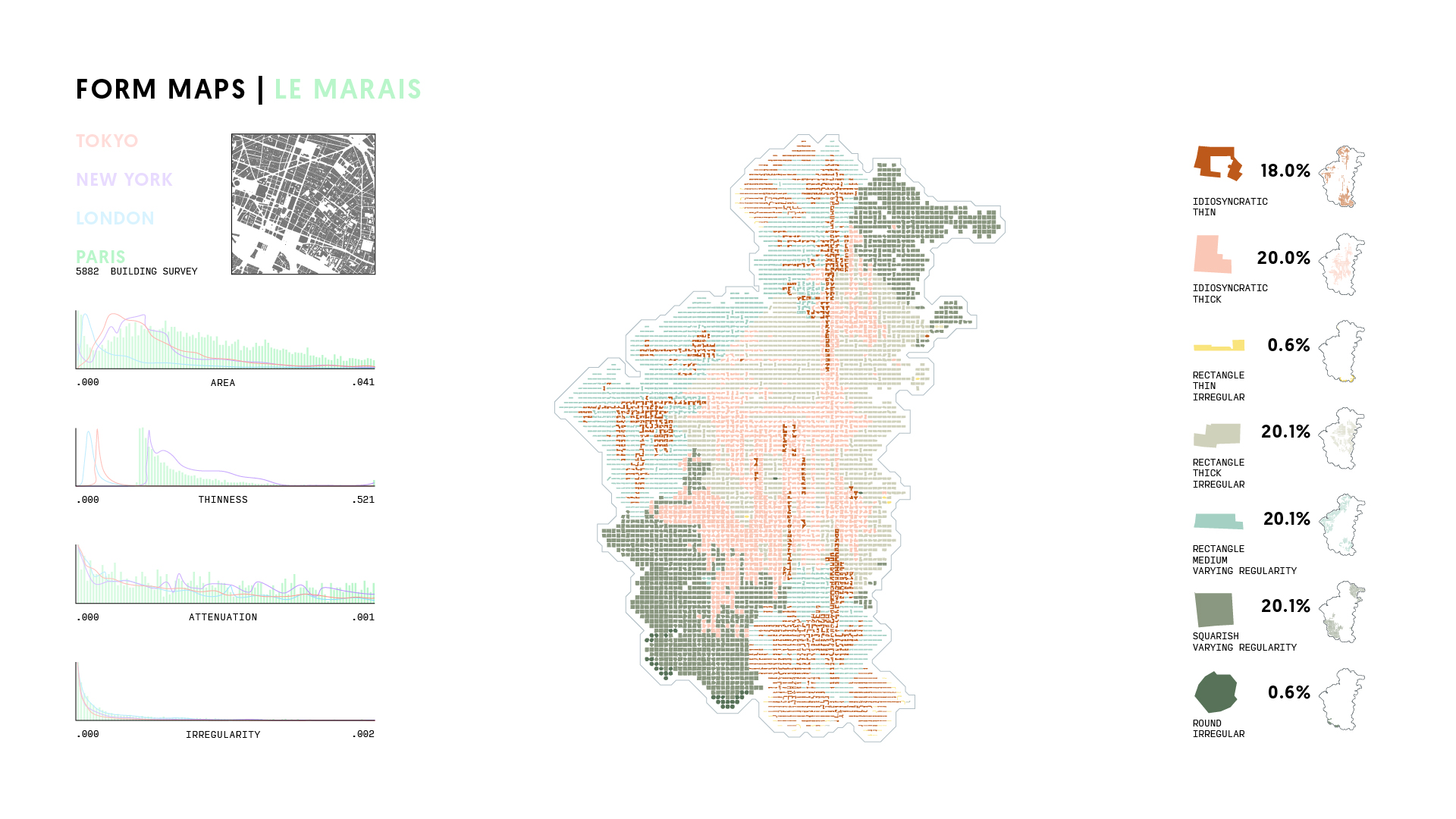
By programming vision-enabled bots to scan and synthesize billions of figure-ground shapes and building plans, we can apply data-science techniques to make explicit the formal associations and affinities across the entire corpus of existing buildings. In place of the perennial ad hoc search for meager precedent associations, we could systematically and objectively classify the universe of existing architectural form into a kind of phylogenic tree of shape.
Using bots we have specially developed for this purpose, our office is creating maps that lay out the relational similarity, clustered affinity, and overall categorical distribution of architectural form – a kind of genealogical tree for buildings. In homage to Colin Rowe’s work in metric associations for typological classification, we affectionately call this tool the RoweBot.
The Rowebot computes a series of 40 metrics on each individual building shape. Some are relatively simple, such as the ratio of perimeter to area, while others are calculus-based differential operators, which determine the variation in area distribution from the centroid of a shape. Yet others are more advanced, using least-squares shape fitting, spectral-graph analysis, or convexity measures to find unique differentiators among shapes.
It constructs what might be termed cartograms: map-like representations which do not chart geographic space but instead the space of similarity, affinity, and perception. By mapping a parametric territory of form, it not only plots the world of existing form but also reveals, through its gaps, a terra incognita of design yet to appear.
By programming vision-enabled bots to scan and synthesize billions of figure-ground shapes and building plans, we can apply data-science techniques to make explicit the formal associations and affinities across the entire corpus of existing buildings. In place of the perennial ad hoc search for meager precedent associations, we could systematically and objectively classify the universe of existing architectural form into a kind of phylogenic tree of shape.
Using bots we have specially developed for this purpose, our office is creating maps that lay out the relational similarity, clustered affinity, and overall categorical distribution of architectural form – a kind of genealogical tree for buildings. In homage to Colin Rowe’s work in metric associations for typological classification, we affectionately call this tool the RoweBot.
The Rowebot computes a series of 40 metrics on each individual building shape. Some are relatively simple, such as the ratio of perimeter to area, while others are calculus-based differential operators, which determine the variation in area distribution from the centroid of a shape. Yet others are more advanced, using least-squares shape fitting, spectral-graph analysis, or convexity measures to find unique differentiators among shapes.
It constructs what might be termed cartograms: map-like representations which do not chart geographic space but instead the space of similarity, affinity, and perception. By mapping a parametric territory of form, it not only plots the world of existing form but also reveals, through its gaps, a terra incognita of design yet to appear.